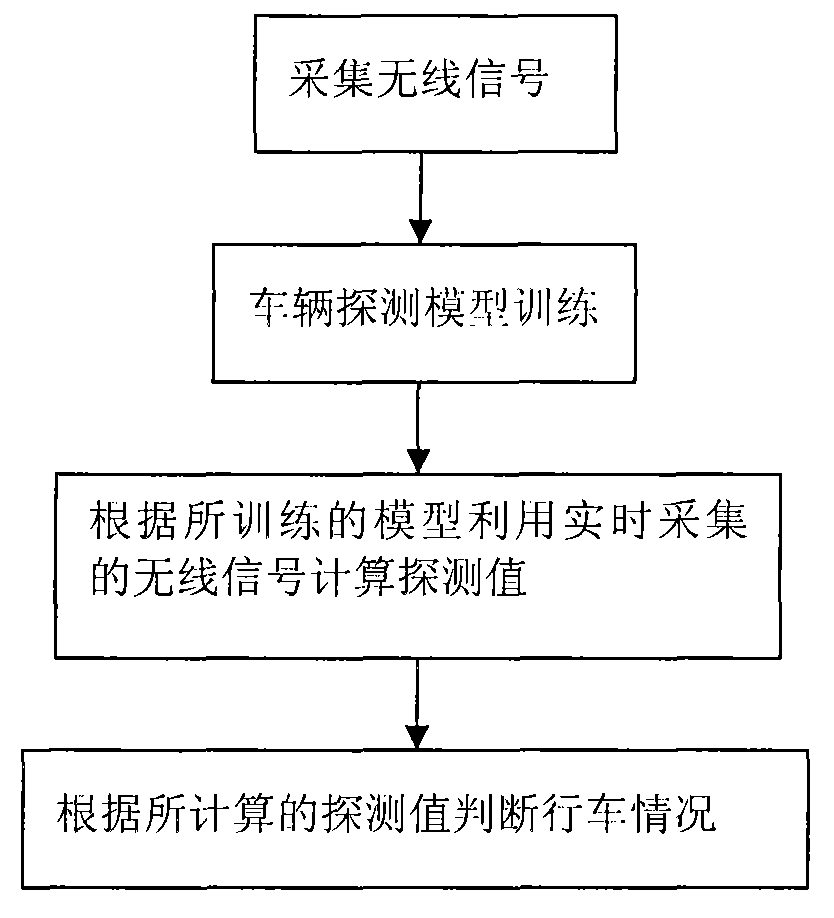
1.一种车辆探测模型训练方法,包括如下步骤: 采集来自多个信号源的无线信号; 以所述无线信号构成的信号特征向量作为输入,以所述信号特征向量 的不同的数值对应的探测值作为输出,训练车辆探测模型。
2.根据权利要求1所述的训练方法,其特征在于,所述信号源是3 至10个。
3.根据权利要求1或2所述的训练方法,其特征在于,所述无线信号 是WiFi信号。
4.根据权利要求1或2所述的训练方法,其特征在于,所述训练车辆 探测模型采用机器学习方法。
5.根据权利要求4所述的训练方法,其特征在于,所述机器学习方法 包括支持向量机(SVM)和BP神经网络。
6.一种基于权利要求1所述的车辆探测模型的车辆通过检测方法,包 括如下步骤: 实时采集来自多个信号源的无线信号; 对于所述实时采集的无线信号构成的信号特征向量根据所述车辆探 测模型计算探测值; 根据所述所计算的探测值判断是否有车辆通过。
7.一种基于权利要求1所述的车辆探测模型的车辆通过检测系统,包 括如下部件: 数据采集部件,用于实时采集来自多个信号源的无线信号; 计算部件,用于以所述实时采集的无线信号构成的信号特征向量根据 所述车辆探测模型计算探测值,并根据所述所计算的探测值判断是否有车 辆通过。
8.一种基于权利要求6所述的检测方法的道路用灯控制方法,包括如 下步骤: 根据所述判断结果控制道路用灯。
9.根据权利要求8所述的控制方法,其特征在于,所述道路用灯是路 灯。
10.根据权利要求9所述的控制方法,其特征在于,若所述判断结果 为无车辆通过,将所述所计算的探测值控制范围内的路灯关闭或者微亮照 明;若所述判断结果为有车辆通过,将所述所计算的探测值控制范围内的 路灯打开。
11.根据权利要求9所述的控制方法,其特征在于,所述路灯为LED 灯具。
12.根据权利要求8所述的控制方法,其特征在于,所述道路用灯是 交通灯。
13.根据权利要求12所述的控制方法,其特征在于,若所述判断结果 为东西方向无车而南北方向有车,则当东西方向交通灯为绿灯时将交通灯 马上切换;当东西方向交通灯为红灯时则将交通灯延时切换;若所述判断 结果为东西方向有车而南北方向无车,则做相反操作。
14.一种包含权利要求7所述的检测系统的道路用灯控制系统,还包 括下列部件: 灯控部件,用于根据所述判断结果控制道路用灯。
15.根据权利要求14所述的控制系统,其特征在于,对于所述道路用 灯为路灯的情况,则所述检测系统中的相邻的所述数据采集部件间距为 100至300米。
展开

 北京
北京
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们