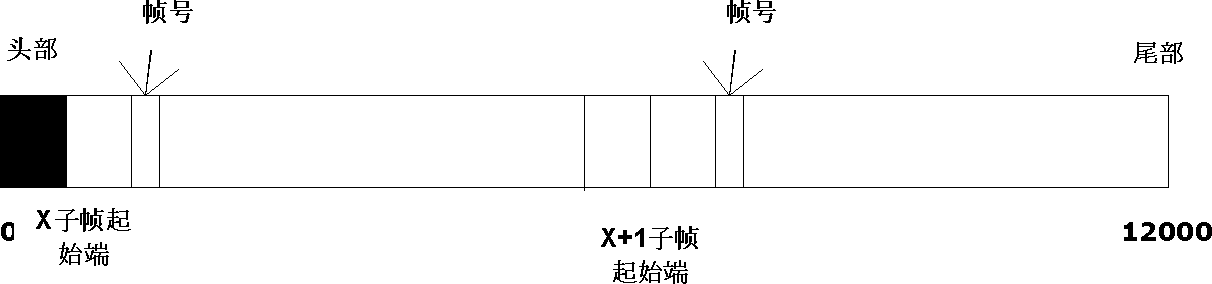
1.一种用于GPS软件接收机的初始定位方法,包括以下步骤:步骤1,预先跟踪解调两个子帧长度的导航数据,根据导航数据的电文格式从中提取出初始帧的帧号;步骤2,根据所述初始帧的帧号,从步骤1解调的导航数据及后续的导航数据中挑选出第1子帧、第2子帧和第3子帧,跳过与初始定位无关的帧;步骤3,根据所述第1、2、3子帧的数据来计算GPS软件接收机的位置。
2.根据权利要求1所述的初始定位方法,其特征在于在所述步骤1和步骤2中所处理的导航数据是由跟踪环路输出的1KHz的数据。
3.根据权利要求1或2所述的初始定位方法,其特征在于所述步骤1包括以下步骤:(11)跟踪解调两个子帧长度的导航数据;(12)匹配前导码,以找到子帧的起始端,然后检测与该前导码所处位置相隔一个子帧长度处的数据,再次匹配前导码;如果再次匹配成功,则执行(13)步,否则从该前导码所处位置后开始重新寻找前导码;(13)根据所述子帧的交接字的最后两位校验位进行校验;如果成功则执行第(14)步,否则该前导码所处位置后开始执行第(12)(13)步;(14)提取帧号,如果所取帧号在1至5之间,则将该帧号设为初始帧号;否则从帧号所处位置后开始执行第(12)(13)(14)步。
4.根据权利要求3所述的初始定位方法,其特征在于所述步骤2包括以下步骤:如果初始帧号为1时,读取完整的当前帧,并跟踪解调后续2个子帧长度的数据;如果初始帧号为2时,读取完整的当前帧,并跟踪解调后续1个子帧长度的数据,然后跳过2个子帧,跟踪解调后续1个子帧长度的数据;如果初始帧号为3时,读取完整的当前帧,跳过2个子帧,跟踪解调后续2个子帧长度的数据;如果初始帧号为4时,跳过当前帧以及下一子帧,跟踪解调后续3个子帧长度的数据; 如果初始帧号为5时,跳过当前帧,跟踪解调后续的3个子帧长度的数据。
5.根据权利要求4所述的初始定位方法,其特征在于在步骤2中,当出现跳帧情况时,在跟踪解调后续数据之前,先预读一小部分数据进行跟踪,所述小部分数据为500比特。
6.根据权利要求5所述的初始定位方法,其特征在于所述步骤3包括以下步骤:将所述初始帧的交接字中的周时间计数乘以6再减去6秒,作为所述步骤2所选出的第1子帧中的周时间计数;根据所选择的3个子帧中的数据来计算GPS软件接收机的位置。
7.根据权利要求3所述的初始定位方法,所述跟踪解调包括位同步和帧同步,其特征在于在所述位同步包括以下步骤:a跟踪一段数据,从第一个数据跳变位开始记录;b如果该跳变位后面的一段数据中隔20ms的整倍数的位置同样出现跳变位则计数加一;c重复上述步骤b,直至计数等于m,其中m为大于1的正整数;d选择此跳变位作为数据的比特起始位,执行校验过程,如果出现差错则计数清0,返回执行步骤a,b直至计数等于m+1时,执行d。
8.根据权利要求7所述的初始定位方法,其特征在于在所述m初始值为3。
展开

 北京
北京
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们