
- 技术(专利)类型 发明专利
- 申请号/专利号 GB2566648
- 技术(专利)名称 一种基于电子地图和电子罗盘的自动驾驶系统的英国专利
- 项目单位
- 发明人 罗厚兵
- 行业类别 人类生活必需品
- 技术成熟度 正在研发
- 交易价格 ¥面议
- 联系人 罗厚兵
- 发布时间 2021-05-07
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们
 北京
北京
客服热线:010-83278899
微信公众号 扫一扫 关注我们

项目简介
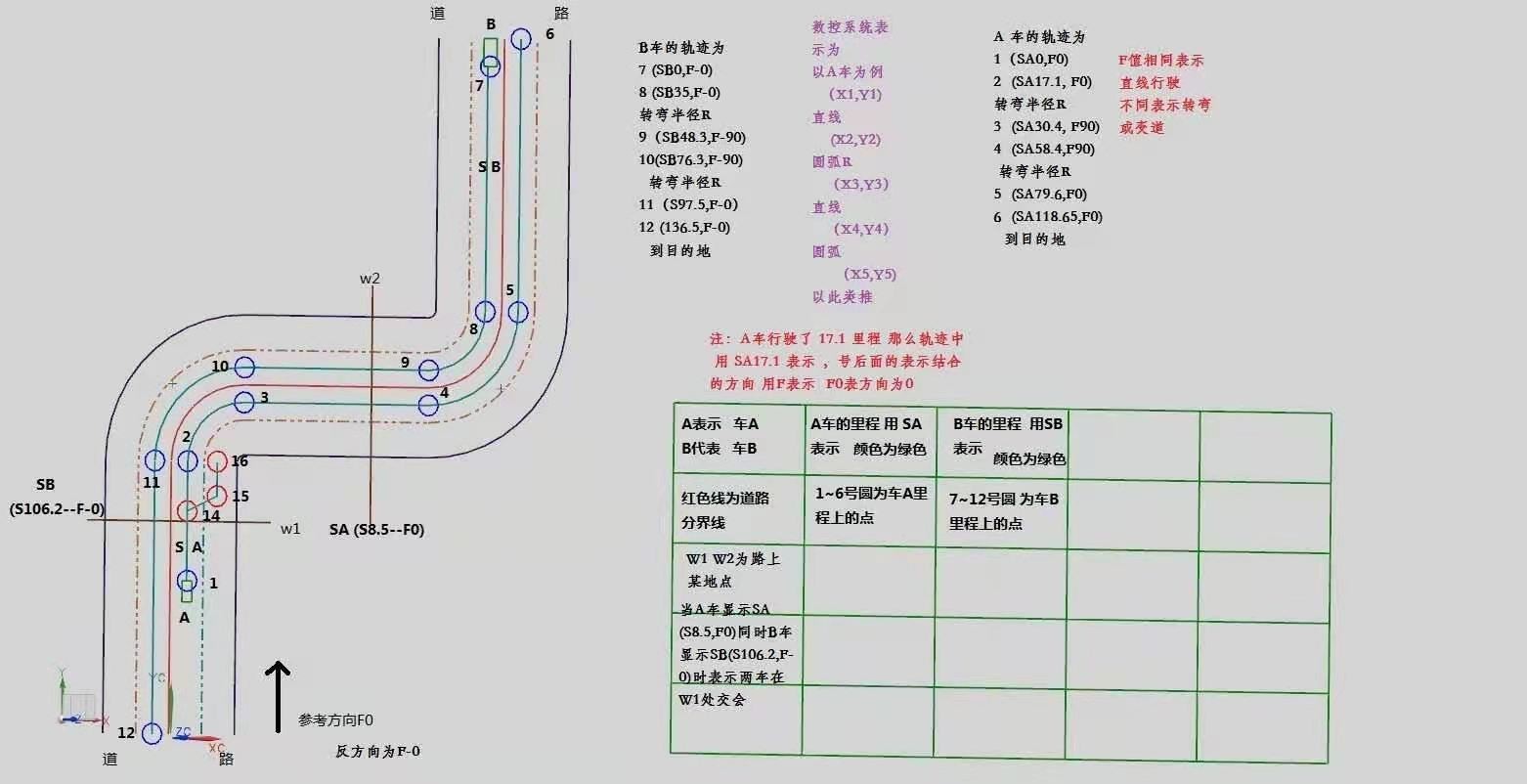
一.目前来说研发自动驾驶电子地图是绕不过去的技术,在我看来,电子地图做自动驾驶有2种形式,1是目前研究了很久的图像化处理方案,这些需要和摄影头和激光雷达协同处理,缺点是数据量超大,芯品算力不足,等缺点\2是就是本英国专利中所涉及的用里程和方向,点位,计算出车辆的路径,理论上,理想状态下是可以不用外部传感器参与,也就几何插值技术的改进优化版本属于自动驾驶专用。这样最大的优势,很明显,数值计算肯定比图像计算所需要的算力低得多(注:里程和方向都可以用数值表示,引入数学关系就可以规划路径,这是常识)
二.本专利中涉及另一项技术就是,局域互联,这是在目前所有自动驾驶领域没有涉及到的,采用这项技术可以实现,车辆之间的,车和人,以及车和人,车和交通设施的主动识别,预判。我把现在,用摄影头的等的技术归纳为被动探测,相比于被动探测,在局域网内的主动识别,效率高,准确度高。当然结合部分被动探测技术,安全性更高
三.现在都认为网联化才能解决自动驾驶问题,还有就是缺芯的大背景下,降低自动驾驶的算力,的解决方案才是最优解。这2个基础性的问题,本专利中的技术都可以解决!!!另外局域互联技术可以避免互联的安全问题,也就是黑客。
说明书
一.目前来说研发自动驾驶电子地图是绕不过去的技术,在我看来,电子地图做自动驾驶有2种形式,1是目前研究了很久的图像化处理方案,这些需要和摄影头和激光雷达协同处理,缺点是数据量超大,芯品算力不足,等缺点\2是就是本英国专利中所涉及的用里程和方向,点位,计算出车辆的路径,理论上,理想状态下是可以不用外部传感器参与,也就几何插值技术的改进优化版本属于自动驾驶专用。这样最大的优势,很明显,数值计算肯定比图像计算所需要的算力低得多(注:里程和方向都可以用数值表示,引入数学关系就可以规划路径,这是常识)
二.本专利中涉及另一项技术就是,局域互联,这是在目前所有自动驾驶领域没有涉及到的,采用这项技术可以实现,车辆之间的,车和人,以及车和人,车和交通设施的主动识别,预判。我把现在,用摄影头的等的技术归纳为被动探测,相比于被动探测,在局域网内的主动识别,效率高,准确度高。当然结合部分被动探测技术,安全性更高
三.现在都认为网联化才能解决自动驾驶问题,还有就是缺芯的大背景下,降低自动驾驶的算力,的解决方案才是最优解。这2个基础性的问题,本专利中的技术都可以解决!!!另外局域互联技术可以避免互联的安全问题,也就是黑客。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本





提交

公众号
全国技术转移公共服务平台