1.一种夹取切割机构,包括具有执行敞口腔的外壳(1),其特征在于:在执行敞口腔内壁不同高度同向设置有夹取双向丝杆(20)和切割双向丝杆(15),其中,在夹取双向丝杆(20)上配合连接有两个夹取螺母(19),两个夹取螺母(19)的侧端面分别与一夹紧辊(8)连接,当夹取双向丝杆(20)正反转时,夹取丝杆可带动两夹取螺母(19)移动并作相互靠近或远离动作;在切割双向丝杆(15)上配合连接有两个切割螺母(14),两个切割螺母(14)的侧端面分别与一切刀(7)连接,当切割双向丝杆(15)正反转时,切割丝杆可带动两切割螺母(14)移动并作相互靠近或远离动作;所述切刀(7)的切口(21)、夹紧辊(8)的夹持部(23)延伸出执行敞口腔。
2.根据权利要求1所述的夹取切割机构,其特征在于:所述夹取双向丝杆(20)与切割双向丝杆(15)通过同步带(18)和同步轮(17)连接,构成同步运动。
3.根据权利要求2所述的夹取切割机构,其特征在于:所述夹取双向丝杆(20)的螺距大于切割双向丝杆(15)的螺距。
4.根据权利要求2所述的夹取切割机构,其特征在于:所述夹取双向丝杆(20)或切割双向丝杆(15)通过带轮(10)和传输带(11)与一驱动电机(13)连接。
5.根据权利要求1所述的夹取切割机构,其特征在于:所述夹取双向丝杆(20)和切割双向丝杆(15)分别与一电机连接。
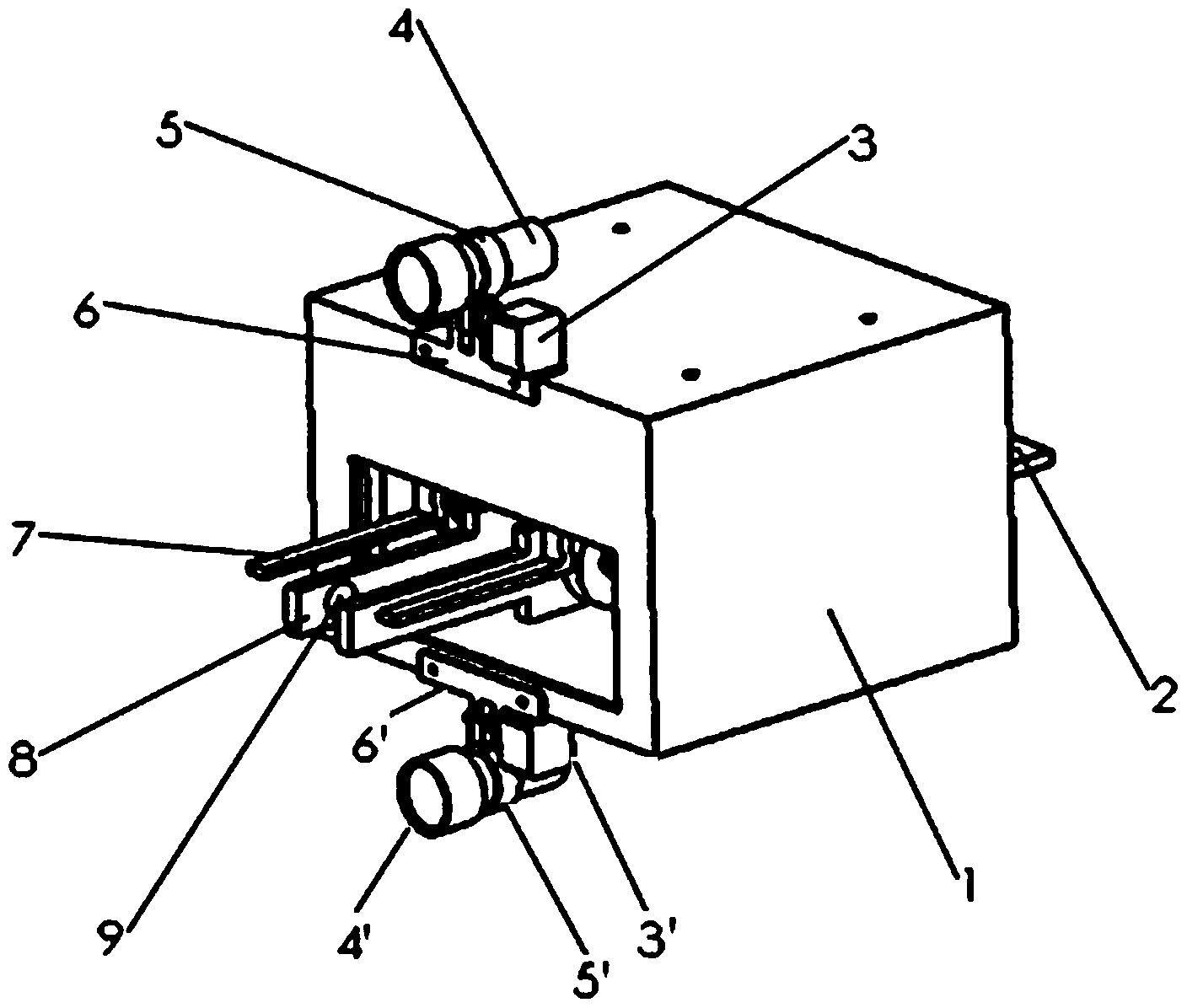
6.根据权利要求1所述的夹取切割机构,其特征在于:在与所述切刀(7)、夹紧辊(8)运动方向垂直的方向的外壳(1)上下部位分别设置有第一摄像头(4)和第二摄像头(4’)。
7.根据权利要求6所述的夹取切割机构,其特征在于:所述第一摄像头(4)通过第一转动架(5)铰接在第一支架(6)上,第一支架(6)连接在外壳(1)上,第一转动架(5)与设置在第一支架(6)一侧的第一转动电机(3)连接,通过第一转动电机(3)可调节第一转动架(5)的转动角度,实现第一摄像头(4)摄像角度的调整;第二摄像头(4’)通过第二转动架(5’)铰接在第二支架(6’)上,第二支架(6’)连接在外壳(1)上,第二转动架(5’)与设置在第二支架(6’)一侧的第二转动电机(3’)连接,通过第二转动电机(3’)可调节第二转动架(5’)的转动角度,实现第二摄像头(4’)摄像角度的调整。
8.根据权利要求1所述的夹取切割机构,其特征在于:所述夹紧辊(8)的夹持内壁面设置有压力传感器(9)。
9.一种果实采摘机器手,其特征在于:安装有权利要求1至8任一所述的夹取切割机构。
10.一种机器人,其特征在于:安装有权利要求1至8任一所述的夹取切割机构。
展开

 北京
北京
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们