
- 技术(专利)类型 发明专利
- 申请号/专利号 201210053524.8
- 技术(专利)名称 对彩色数字图像进行视觉感知高保真变换的方法及系统
- 项目单位
- 发明人 侯克杰
- 行业类别 人类生活必需品
- 技术成熟度 正在研发
- 交易价格 ¥面议
- 联系人 冯爽
- 发布时间 2020-11-02
 北京
北京
客服热线:010-83278899
 微信公众号 扫一扫 关注我们
微信公众号 扫一扫 关注我们
 北京
北京
客服热线:010-83278899
微信公众号 扫一扫 关注我们

项目简介
本发明涉及数字图像处理领域,具体地涉及对彩色数字图像进行视觉感知高保真变换的方法及系统。所述方法包括步骤:(1)获得彩色数字图像像素颜色R、G和B数值在CIELAB空间的L、C和h;(2)像素颜色归并进入色相位面和亮度序列;(3)完成像素颜色饱和度C的扩展;(4)将图像像素颜色参数和经步骤(3)扩展后得到的饱和度C
说明书
技术领域
本发明涉及数字图像处理领域,具体地涉及对彩色数字图像进行视觉感知高保真变换的方法及系统。
背景技术
在电子设备中使用红、绿和蓝三原色的数字量采集或显示彩色图像已经有数十年了。尽管其三原色是以使显示图像尽可能忠实于真实景物为目标选择的,但是由于材料、技术和成本等制约,到目前为止观看三原色显示的彩色图像与观看真实景物相比仍有很大差距,其中包括颜色不够饱满,光线感不够鲜明等。以ICC(International ColorConsortium国际色彩联盟)规范为代表的颜色管理系统,典型使用gamma(灰度系数)指数调整红、绿和蓝三原色数字量以达到增强图像的目的。用户发现,应用gamma指数后虽然可以使图像颜色看起来显得饱满,但是光线感却显得更差,颜色色调也会出现偏差。任何人使用CIE(International Commission on Lumination国际照明委员会)推荐的色度学方法,都可以定量计算使用gamma指数前后颜色视觉感知分量的变动数量,证明结果与以上实际看到的变化一致。经过20多年的发展,CIE推荐的CAM(Color Appearance Model颜色外观模型)现已成为国际推荐标准,在颜色复制领域发挥着重要作用。但是,无论是CIECAM97s还是CIECAM02模型,主要研究和预测的都是外界条件的变化,如基准白色值及亮度值变化等对颜色观察效果的定量影响,模型并未包括人眼视觉感知的空间及时间特性,也没有包括图像的空域及时域特性。目前的CAM应用于数字图像处理是把每一个像素看做相互独立的颜色,因此以其指导的数字图像的复现和复制还不能满足视觉感知真实性高质量的需要。近期相关业界提出构建iCAM(image Color Appearance Model图像色貌模型),要求模型能够处理视觉感知和彩色图像的空间及时间特性。目前iCAM模型还处于研究的初级阶段,CIE也还未对其进行详细讨论和完整推荐。人眼可见光颜色视觉感知空间特性的量化描述至今未能全部完成,主要原因在于视觉感知颜色量化所需基础数据的不完整性。CIE于1931年推荐CIE1931RGB系统,其所描述的标准色度观察者光谱三刺激值,有史以来首次量化了人类的颜色视觉感知,并因此奠定了现代色度学的基础。但是,这一系统某些固有特性未能在其后的色度学理论研究和技术应用中得以完善。CIE1931RGB系统中光谱三刺激值代表使用红、绿和蓝三原色对等能光谱中各种单色光的匹配数量,由其匹配函数计算的光谱轨迹坐标见图1。图中马蹄形曲线表示光谱轨迹,曲线及下部直线所包括的面积中的颜色曾在很长时间中被误以为包括人类所能看到的全部颜色。三角形内面积表示红、绿和蓝三原色全正值匹配的颜色范围。含有三原色负值的颜色应在三角形以外及曲线以内的面积中。颜色负值的本质为使用红、绿和蓝三原色匹配光谱颜色所存在的差值。负值颜色的物理意义为该非负颜色的相反色,即与该非负颜色相加得到无彩色颜色的颜色即为其相反色。匹配函数存在负值的事实说明,若准确匹配光谱色,需在红、绿和蓝三原色基础上增加以上相反色。因为以双单色及以上多光谱色同时显示的颜色是人类可见颜色的常态,由上推测,CIE1931RGB匹配函数并未包括由红和蓝原色正值组合以及含有绿原色负值的可见光颜色,这部分色相区间的颜色包括蓝紫色、紫色和紫红色,约占人类视觉感知颜色数量的近三分之一,其中应有少部分颜色色品坐标在以上图1的直线以下。如果以可见光颜色视觉感知特性为目标进行颜色高保真仿真复现和复制的研究和应用,这部分匹配函数不应缺少。作为现代色度学基石的配色函数,在CIELAB视觉感知均匀空间中,还无法表现可见光颜色视觉感知空间分布的完整边界,致使人类视觉感知的可见光空间特性的量化描述至今未能全部完成。
发明内容
本发明的目的是为彩色数字图像提供进行高保真视觉感知变换的方法。根据本发明的技术方案,通过提供计算可见光颜色的视觉感知空间以及相关分量当量的方法,实现对彩色数字图像视觉感知分量比对可见光颜色视觉感知空间特性进行优化扩展及映射计算,完成图像的高保真视觉感知变换。本发明的再一目的是提供对彩色数字图像进行高保真视觉感知变换的系统。本发明的方法以及系统属于“史诗颜色一TM”,(FirstEposColorTM),简称“诗色一TM”,(FECrTM),主要是为显著增强图像高保真感知而调整其每一像素颜色的视觉感知饱和度值,调整量取决于该颜色对应的可见光颜色视觉感知空间色相位面当量颜色边界上亮度序列的饱和度值及颜色自身饱和度值。结果,图像每一像素颜色在增加了视觉感知饱和度的同时维持视觉感知色相和亮度不变,且增加的饱和度幅度,更有利于高保真增强图像视觉感知效果。典型彩色数字图像是可见光颜色空间中的真实景物在成像平面的二维投影,因此,图像复现和复制的理想效果应是尽可能接近对真实景物的感知,谓之高保真复现和复制。所以,根据本发明的算法(FECr)包括对可见光颜色空间的视觉感知进行量化表述。根据本发明的方法,对图像固有颜色的视觉感知饱和度相对以上表述的可见光空间特性计算扩展及映射,以图像得到总体相对最多的可见光空间特性为目标计算每一像素增加的饱和度值。典型电子设备和彩色图像颜色视觉感知空间远小于可见光颜色视觉感知空间,因此,如果直接以可见光颜色空间边界为目标调整图像颜色饱和度,在一些色相位面中,将会造成象素颜色饱和度的增量差异悬殊,致使图像劣化。所以,根据本发明的FECr算法在完整描述可见光颜色视觉感知空间的基础上,兼顾设备及图像颜色视觉感知空间饱和度非线性扩展的实际能力,计算出优化的可见光颜色视觉感知空间色相位面颜色当量边界,并以心理物理学方法获取应用效果的统计数据进行校正。因此,根据本发明的方法是获得彩色数字图像高保真复现和复制的有效方法。本发明的方法和系统可用于摄影、摄像、电影、电视、视频游戏等自然景物成像或由计算机生成的由红、绿和蓝三原色合成颜色的任何图像以及相关成像设备。根据本发明的方法,对彩色数字图像进行视觉感知高保真变换包括以下步骤:(1)获得彩色数字图像像素颜色R、G和B数值在CIELAB空间的L、C和h数值,其中,h为色相角,L为亮度、C为饱和度;(2)像素颜色归并进入色相位面和亮度序列,以色相角h值归并进入相应基准色相位面,以亮度L值归并进入相应亮度序列;(3)完成像素颜色饱和度C的扩展,(3-1)确定像素颜色饱和度映射拐点CgL:CgL=CmaxL1×XS1其中,CmaxL1为设备颜色视觉感知空间中像素颜色归并入色相位面的亮度序列最大饱和度值,XS1为设置的比例系数,典型数值范围0.65-0.95;(3-2)计算该亮度序列的饱和度扩展比例BIL:BIL=CmaxLd/CmaxL1其中,CmaxLd为可见光颜色视觉感知空间中像素颜色相同色相位面颜色当量边界上相同亮度序列的饱和度值;(3-3)饱和度扩展比例BIL特性化调控计算,包括:(3-3-1)设置饱和度扩展比例调控系数BIKx,数值范围0.00-1,BILY=BIL×BIKx其中,BIKx允许设置多个分别用于指定条件,BILY为调控后饱和度扩展比例,(3-3-2)设置色相位面区间成对边界HDx和HGx,数值范围0°-359°,HDx和HGx允许设置多对分别用于指定条件,颜色h≥HDx和h≤HGx,BILY=BIL×BIK2其余颜色,BILY=BIL×BIK1边界内侧色相位面过渡区设置数值范围0-20,(3-3-3)设置饱和度比例阈值CGx,数值范围0.00-1,CGx允许设置多个分别用于指定条件,CGx值以下颜色,BILY=BIL×BIK2CGx值以上颜色,BILY=BIL×BIK1CGx值高端一侧过渡区设置数值范围0.00-0.2,(3-4)计算像素颜色饱和度CL扩展后CLN:CLN=CL×BILY,如CLN大于CgL则计算其映射:CLN=CgL+(CLN-CgL)/(CmaxLd-CgL)×(CmaxL1-CgL);(4)将图像像素颜色亮度L、色相角h和经步骤(3)扩展后得到的饱和度CLN数值计算为规范R、G和B值。根据本发明的方法,步骤(1)为获得彩色数字图像像素颜色R、G和B数值在CIELAB空间的L、C和h数值,其中,h为色相角,L为亮度、C为饱和度,可以通过本领域现有的已知方法实现,优选地,根据本发明的具体实施方案,首先执行调用设备视觉感知颜色空间色相位面颜色边界计算模块的步骤,获得必要的3×3矩阵系数。根据本发明的对彩色数字图像进行视觉感知高保真变换的系统包括:(1)显示彩色数字图像的设备的颜色视觉感知空间色相位面颜色边界计算模块,包括:(1-1)设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值计算单元,(1-2)设备颜色视觉感知空间色相位面颜色边界提取单元,以色相h值四舍五入归并设备颜色进入相应基准色相位面,以L值四舍五入归并进入相应亮度序列,提取色相位面各亮度序列的颜色最大饱和度值CmaxL1,作为该色相位面的颜色边界计算基础数值,(1-3)色相位面颜色边界CmaxL1平滑单元,选择色相位面中最大饱和度值Cmaxh1具有的亮度LCmaxh1到最低亮度L=0的亮度序列区间所对应的颜色边界CmaxL1,以标准线性插值算法计算平滑边界,弥补CmaxL1非平滑递减或填补缺失。计算得到的颜色边界以及由亮度LCmaxh1到L=100的亮度序列区间对应的颜色边界,表示该色相位面的应用颜色边界CmaxL1;(2)可见光颜色视觉感知空间色相位面颜色当量边界CmaxLd计算模块;(3)彩色数字图像像素颜色模式正向转换以及归并色相位面和亮度序列模块,包括:(3-1)将彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算单元,其中,h为色相角,L为亮度、C为饱和度,(3-2)像素颜色色相位面和亮度序列归并单元,将图像颜色空间划分为360个基准色相位面,以色相h值四舍五入归并进入相应基准色相位面,将色相位面中亮度L范围划分为101个基准序列,以亮度L值四舍五入归并进入相应亮度序列;(4)图像像素颜色饱和度值扩展模块,包括:(4-1)像素颜色饱和度扩展比例BIL计算单元:BIL=CmaxLd/CmaxL1其中,CmaxLd为像素所在亮度序列在可见光色相位面颜色当量边界上的饱和度值,CmaxL1为像素所在亮度序列在设备色相位面颜色边界上的饱和度值,(4-2)饱和度扩展比例BIL特性化调控计算单元,包括:(4-2-1)设置饱和度扩展比例调控系数BIKx,数值范围0.00-1,BILY=BIL×BIKx其中,BIKx允许设置多个,分别用于指定条件,BILY为调控后饱和度扩展比例,(4-2-2)设置色相位面区间成对边界HDx和HGx,数值范围0°-359°,HDx和HGx允许设置多对分别用于指定条件:颜色h≥HDx和h≤HGx,BILY=BIL×BIK2其余颜色,BILY=BIL×BIK1边界内侧色相位面过渡区设置数值范围0-20,(4-2-3)设置饱和度比例阈值CGx,数值范围0.00-1,CGx允许设置多个分别用于指定条件:CGx值以下颜色,BILY=BIL×BIK2CGx值以上颜色,BILY=BIL×BIK1CGx值高端一侧过渡区设置数值范围0.00-0.2,(4-3)饱和度映射拐点CgL计算单元:CgL=CmaxL1×XS1设置比例系数XS1数值范围0.65-0.95,(4-4)像素颜色饱和度CL扩展到CLN计算单元:CLN=CL×BILY,判断,如果CLN大于CgL则计算映射:CLN=CgL+(CLN-CgL)/(CmaxLd-CgL)×(CmaxL1-CgL);(5)图像像素颜色模式逆向变换及规范化模块:所述计算包括将图像像素颜色的L、h和经模块(4)扩展得到的饱和度CLN数值计算为规范R、G和B值。根据本发明的优选实施方案,所述系统还包括可见光颜色视觉感知空间色相位面颜色最大饱和度计算模块。作为本发明的优选技术方案,设备视觉感知颜色空间色相位面颜色边界数据库先经由本发明的系统中的设备视觉感知颜色空间色相位面颜色边界计算模块运算完成,计算包括:(1-1)设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值的计算,由设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值计算单元执行:使用设备标称的白场和红、绿和蓝三原色相应参数,应用CIE推荐的标准算法,将设备的红、绿和蓝三原色合成的全部颜色,转换为CIEXYZ三刺激值及CIELAB空间L、C和h值,其中包括:应用标称sRGB空间RGB三原色色品参数和D65白场参数计算得到RGB三原色最大饱和度的亮度值:Yr,max=0.2126 Yg,max=0.7152 Yb,max=0.0722应用以上计算得到3×3矩阵系数:非标设备需计算白场和红、绿和蓝三原色最大饱和度时的CIEXYZ三刺激值:使用标准分光光度仪,按照常规规范测量设备白场三刺激值Xw’、Yw’和Zw’,计算白场归一化系数K1:K1=100/Yw’计算设备白场的CIEXYZ三刺激值:Xw=Xw’×K1 Yw=Yw’×K1 Zw=Zw’×K1使用标准分光光度仪,按照常规规范分别测量设备红、绿和蓝三原色最大饱和度条件下的三刺激值,Xr’、Yr’和Zr’,Xg’、Yg’和Zg’,Xb’、Yb’和Zb’。分别计算三原色的CIEXYZ三刺激值:Xr,max=Xr’×K1,Yr,max=Yr’×K1,Zr,max=Zr’×K1Xg,max=Xg’×K1,Yg,max=Yg’×K1,Zg,max=Zg’×K1Xb,max=Xb’×K1,Yb,max=Yb’×K1,Zb,max=Zb’×K1用以上计算得到的三原色CIEXYZ三刺激值,替代以上所述标准方法中的3×3矩阵系数,以计算得到的白场CIEXYZ三刺激值替代以上所述设备标称白场CIEXYZ三刺激值,计算CIELAB空间L、C和h数值。(1-2)设备视觉感知颜色空间色相位面颜色边界计算,由设备颜色视觉感知空间色相位面颜色边界提取单元执行:以0-359整数表示基准色相位面,以色相h值四舍五入归并设备颜色进入相应基准色相位面,并以0-100整数表示基准亮度序列,以L值四舍五入归并进入相应亮度序列,提取色相位面各亮度序列中颜色最大饱和度值CmaxL1,作为该色相位面的颜色边界计算基础;(1-3)色相位面颜色边界平滑计算,由色相位面颜色边界CmaxL1平滑单元执行:提取色相位面中最大饱和度值Cmaxh1具有的亮度LCmaxh1到最低亮度L=0的亮度序列区间所对应的颜色边界,以标准线性插值算法计算平滑边界,弥补原亮度序列的最大饱和度CmaxL1非平滑递减或填补缺失。计算得到的颜色边界CmaxL1以及由亮度LCmaxh1到L=100的亮度序列区间对应的颜色边界CmaxL1,表示该色相位面的应用颜色边界。将以上计算结果存储为数据库,数据以首序色相位面次序亮度序列排序,共36360行。根据本发明的具体实施方案,随步骤(1)后执行步骤(2):调用可见光的视觉感知颜色空间色相位面颜色当量边界数据库。作为本发明的另一优选技术方案,可见光颜色视觉感知空间色相位面颜色当量边界数据库先经由本发明的系统中的可见光颜色视觉感知空间色相位面颜色最大饱和度计算模块以及可见光颜色视觉感知空间色相位面颜色当量边界计算模块运算完成,计算包括:(2-1)可见光颜色视觉感知空间色相位面颜色最大饱和度计算,由可见光颜色视觉感知空间色相位面颜色最大饱和度计算模块执行:(2-1-1)色相位面38°-317°计算,由色相位面38°-317°计算单元执行:以CIE 1931XYZ标准色度观察者光谱三刺激值中波长380nm至780nm间隔5nm的x、y和z数值,以及计算设备颜色空间应用的白场CIEXYZ三刺激值,以CIE推荐的方法计算L、C和h数值,并以h值四舍五入归并色相位面,取用38°到317°色相间隔内色相位面的L和C数值,线性插值计算其中的空白色相位面的L和C值,以L和C值作为可见光颜色视觉感知空间相应色相位面的最大饱和度Cmaxh2及其亮度LCmach2。(2-1-2)色相位面0°-37°及318°-359°计算,由色相位面0°-37°及318°-359°计算单元执行:以CIERGB颜色空间红、绿和蓝三原色标准参数以及计算设备颜色空间应用的白场CIEXYZ三刺激值,计算全部红、绿和蓝三原色合成颜色的L、C和h参数,其中包括:以标称CIERGB空间RGB三原色色品参数以及D65白场参数应用上述步骤(1)中相同方法计算得到3×3矩阵系数:Xr,max=0.4108 Yr,max=0.1481 Zr,max=0Xg,max=0.3210 Yg,max=0.8401 Zg,max=0.0105Xb,max=0.2185 Yb,max=0.0118 Zb,max=1.0783在归并的色相位面中,选用0°到37°和318°到359°色相位面,并提取其中最大饱和度Cmaxh2及其亮度LCmach2数值。(2-2)可见光颜色视觉感知空间色相位面颜色当量边界计算,由可见光颜色视觉感知空间色相位面颜色当量边界CmaxLd计算模块执行:(2-2-1)可见光颜色视觉感知空间与设备颜色视觉感知空间色相位面最大饱和度比值及优化计算,由可见光颜色视觉感知空间与设备颜色视觉感知空间色相位面最大饱和度比值及优化计算单元执行:分别选择0°到359°色相位面,计算可见光颜色空间Cmaxh2与设备颜色空间Cmaxh1的比例值Bmaxh:Bmaxh=Cmaxh2/Cmaxh1设置比例系数FX1和当量系数FX2,其中,FX1数值范围2.50-6.00,FX2数值范围1.50-2.50,计算Bmaxh的规范化当量比例Bmaxd:Bmaxh值大于FX1的色相位面的规范化计算:Bmaxd=(Bmaxh-FX1)/(比例区间最大比例值-FX1)×0.1+FX2Bmaxh值小于等于FX1大于(FX1-1)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-1))/(比例区间最大比例值-(FX1-1))×0.05+(FX2-0.05)Bmaxh值小于等于(FX1-1)大于(FX1-1.5)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-1.5))/(比例区间最大比例值-(FX1-1.5))×0.05+(FX2-0.1)Bmaxh值小于等于(FX1-1.5)大于(FX1-2)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-2))/(比例区间最大比例值-(FX1-2))×0.1+(FX2-0.2)Bmaxh值小于等于(FX1-2)大于(FX1-2.5)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-2.5))/(比例区间最大比例值-(FX1-2.5))×0.05+(FX2-0.25)Bmaxh值等于(FX1-2.5)及以下的色相位面的规范化计算:Bmaxd=Bmaxh/比例区间最大比例值×0.05+(FX2-0.3)(2-2-2)可见光颜色空间色相位面最大饱和度当量及颜色边界计算,由可见光颜色空间色相位面最大饱和度当量Cmaxhd及颜色当量边界CmaxLd计算单元执行:色相位面最大饱和度当量Cmaxhd计算:Cmaxhd=Cmaxh1×Bmaxd色相位面颜色当量边界计算:在横坐标为饱和度C、纵坐标为亮度L的笛卡尔坐标平面,以Cmaxh2和LCmaxh2值,标点Dmaxh2,在Dmaxh2到L=100点连线上标示Cmaxhd,其纵坐标值四舍五入的亮度序列值记为LCmaxhd,其坐标点记为Dmaxhd;在坐标平面标示相同色相位面的设备颜色边界,再标示Dmaxhd到L=0点连线,计算其亮度区间中相应亮度序列的最大饱和度值平滑递减的前提下包容设备颜色边界所需的饱和度值Cmaxhd,此部分值及Dmaxhd到L=100点连线上饱和度值Cmaxhd,构成可见光色相位面颜色的当量边界。将以上计算结果存储为数据库,数据以首序色相位面次序亮度序列排序,共36360行。根据本发明的具体实施方式,步骤(3)为彩色数字图像的红、绿和蓝三原色值转换为CIELAB空间L、C和h值并归并入相应色相位面及亮度序列。调用本发明的系统中的彩色数字图像像素颜色模式正向转换以及归并色相位面和亮度序列模块计算:(3-1)将彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算,由彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算单元执行:使用显示图像的设备标称或图像本身嵌入的白场和红、绿和蓝三原色相应参数,应用CIE推荐的标准算法,将图像像素的红、绿和蓝三原色合成的颜色,转换为CIEXYZ三刺激值及CIELAB空间L、C和h值,其中包括:应用标称sRGB空间RGB三原色色品以及D65白场参数,计算得到RGB三原色最大饱和度的亮度值:Yr,max=0.2126 Yg,max=0.7152 Yb,max=0.0722应用以上值计算得到3×3矩阵系数:非标设备上显示图像须计算设备白场和红、绿和蓝三原色最大饱和度的CIEXYZ三刺激值:使用标准分光光度仪,按照常规规范测量设备白场三刺激值Xw’、Yw’和Zw’,计算白场归一化系数K1:K1=100/Yw’计算设备白场的CIEXYZ三刺激值:Xw=Xw’×K1,Yw=Yw’×K1,Zw=Zw’×K1使用标准分光光度仪,按照常规规范分别测量设备红、绿和蓝三原色最大饱和度条件下的三刺激值,Xr’、Yr’和Zr’,Xg’、Yg’和Zg’,Xb’、Yb’和Zb’分别计算三原色的CIEXYZ三刺激值:Xr,max=Xr’×K1,Yr,max=Yr’×K1,Zr,max=Zr’×K1Xg,max=Xg’×K1,Yg,max=Yg’×K1,Zg,max=Zg’×K1Xb,max=Xb’×K1,Yb,max=Yb’×K1,Zb,max=Zb’×K1用以上计算得到的三原色CIEXYZ三刺激值,替代以上所述标准方法中的3×3矩阵系数,以计算得到的白场CIEXYZ三刺激值替代以上所述设备标称白场CIEXYZ三刺激值,计算CIELAB空间L、C和h数值。(3-2)像素颜色色相位面和亮度序列归并计算,由像素颜色色相位面和亮度序列归并单元执行:将图像颜色空间划分为0-359共360个基准色相位面,以图像像素颜色色相h值四舍五入归并入相应基准色相位面,将色相位面中亮度L范围划分为0-100共101个基准序列,以颜色亮度L值四舍五入归并入相应亮度序列,使像素颜色参数可用整数色相h,整数亮度L和含有四位小数的饱和度C表示,达成饱和度扩展的计算条件之一。根据本发明的具体实施方式,步骤(4)为计算图像像素颜色饱和度扩展。调用本发明的系统中的图像像素颜色饱和度值扩展模块,计算包括:(4-1)计算像素颜色饱和度映射拐点CgL,由饱和度映射拐点CgL计算单元执行:CgL=CmaxL1*XS1CmaxL1为以像素色相位面和亮度序列整数值在设备视觉感知颜色空间色相位面数据库检索调用的最大饱和度值,XS1为根据需要设置的拐点函数,数值范围0.65-0.95,典型为0.8-0.9;(4-2)计算像素颜色饱和度扩展比例BIL,由像素颜色饱和度扩展比例BIL计算单元执行:BIL=CmaxLd/CmaxL1CmaxLd为以像素色相位面和亮度序列整数值在可见光视觉感知颜色空间色相位面颜色当量边界数据库检索调用的当量饱和度值;允许调用本发明的系统中的多种饱和度扩展比例调控子模块:(4-2-1)设置饱和度扩展比例调控的子模块:所述计算包括设置多个饱和度扩展比例调控系数BIKx,数值范围0.00-1,以BILY=BIKx×BIL作为像素实际应用的饱和度扩展比例,典型,人物图像BIK2典型为0.10-0.40,风景图像BIK1典型为0.40-0.90;(4-2-2)设置色相位面区间边界的子模块:所述计算包括设置多组色相位面区间,色相区间边界HDx和HGx,数值范围0°-359°,对指定色相区间内颜色使用与区间外不同的饱和度扩展比例BILY,人物图像典型色相区间HD1=340°和HG1=100°,此色相区间内,BILY=BIK2×BIL;此色相区间以外,BILY=BIK1×BIL。在色相区间边界内侧设过渡色相间隔,控制指定色相区间内外饱和度扩展比例平滑改变,过渡区数值范围0-20;(4-2-3)设置饱和度比例阈值的子模块:所述计算包括设置饱和度比例值作为阈值CGx,数值范围0.00-1,阈值作为同一亮度序列中颜色使用不同饱和度扩展比例的饱和度比值分界,典型,人物图像设置CGx典型为0.50-0.75,阈值以下颜色,BILY=BIK2×BIL,阈值以上颜色,BILY=BIK1×BIL。阈值以上一侧设过渡区,调控饱和度扩展比例平滑改变,过渡区数值范围0.00-0.2;(4-3)计算像素颜色饱和度CL扩展,由像素颜色饱和度CL扩展到CLN计算单元执行:CLN=CL*BILY,BILY受到上述三种饱和度扩展比例调控设置的调控,计算结果CLN如果大于CgL则计算映射:CLN=CgL+(CLN-CgL)/(CmaxLd-CgL)*(CmaxL1-CgL)根据本发明的具体实施方式,步骤(5)为将图像像素颜色L、h、和饱和度CLN数值计算为规范R、G和B值。根据本发明的优选技术方案,调用本发明的系统中的图像像素颜色模式逆向变换及规范化模块,计算包括:使用CIE推荐的标准方法,以图像像素颜色计算得到且未改变的的亮度L、色相角h值以及经计算扩展后得到的CLN值计算为设备的红、绿和蓝三原色值。此算法为以上步骤(3)的逆运算,由像素颜色CIELAB参数计算CIEXYZ三刺激值所需白场CIEXYZ三刺激值与正向计算相同,由像素颜色CIEXYZ三刺激值计算RGB值所需3×3矩阵系数由以上步骤(3)所用矩阵3×3系数求逆获得:分别对计算得到的R、G和B值取整,并对大于255的数值规范化为255,对小于0的数值规范化为0。典型由红、绿和蓝三原色合成颜色的数字图像,以风景图像为例,根据本发明的FECr算法调整每一像素颜色的视觉感知饱和度参数后,与图像原始饱和度数值比较,可以看到FECr算法调整后颜色饱和度值增加幅度平均约为52%,图像约50%的像素饱和度增加了70%,30%的像素增加70-30%,10%的像素增加30-10%,10%的像素增加10-0%。调整前后的像素颜色饱和度值相对其所归并的色相位面亮度序列最大饱和度值的比例之间的关系,表现出饱和度实际增量的非线性。根据本发明的FECr算法,在显示图像的设备颜色空间边界没有扩大的条件下,计算图像中视觉较敏感的颜色使之增加相对较多的可见光颜色视觉感知特性,计算相对较不敏感的颜色增加较少或维持不变,这种非线性增强方法可以使观看图像得到相对显著接近在可见光颜色空间观看实际景物的效果。
附图说明
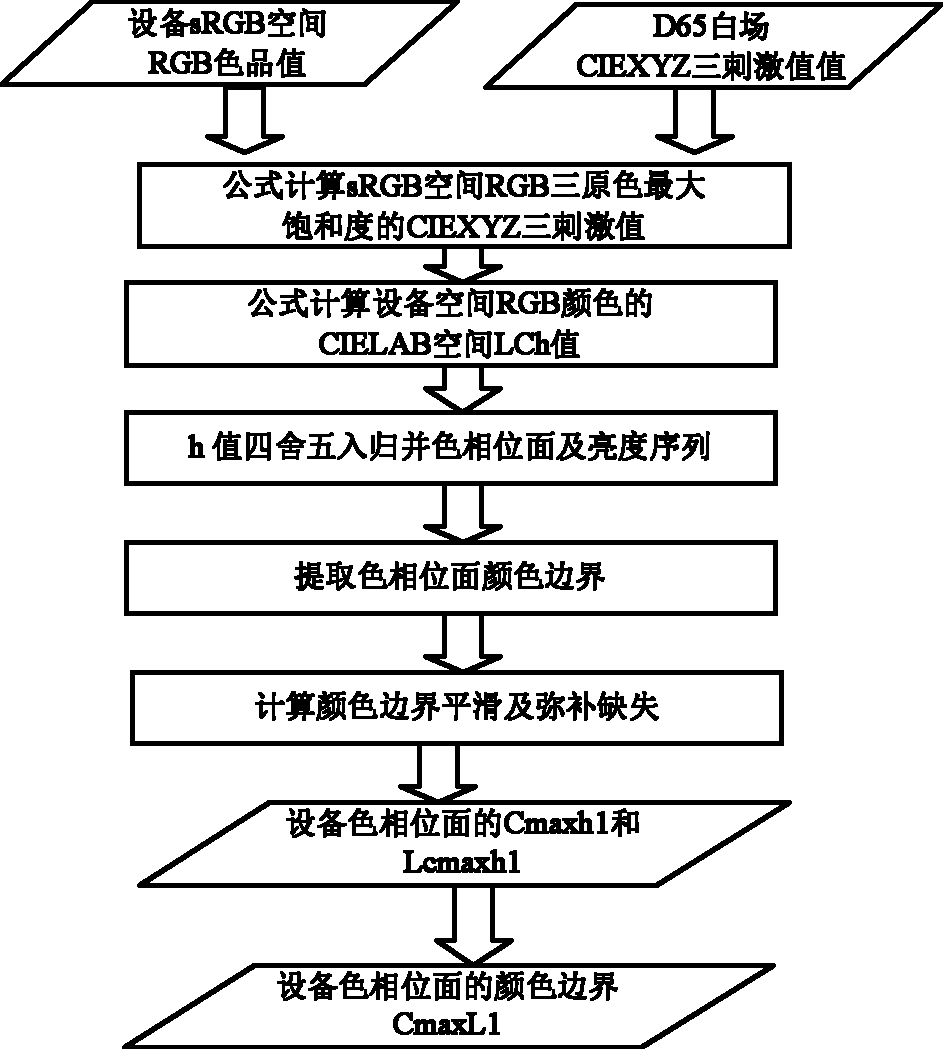
图1以CIE1931XYZ系统光谱三刺激值计算和在CIE xyY空间xy坐标平面标示的等能光谱轨迹,横坐标x,纵坐标y。图2-1根据本发明的具体实施例的对彩色数字图像进行视觉感知高保真变换的方法的流程图,说明了设备颜色视觉感知空间色相位面颜色边界计算流程;图2-2根据本发明的具体实施例的对彩色数字图像进行视觉感知高保真变换的方法的流程图,说明了可见光颜色视觉感知空间色相位面颜色当量边界计算流程;图2-3根据本发明的具体实施例的对彩色数字图像进行视觉感知高保真变换的方法的流程图,说明了彩色数字图像像素颜色高保真视觉感知变换计算流程。图3图中红圈显示非标设备颜色视觉感知空间示例色相位面全部归并颜色坐标,中部灰线表示归并亮度序列算法,下部灰线表示以线性插值纠正相应亮度序列最大饱和度CmaxL1的非平滑递减及弥补缺失计算结果,横坐标饱和度C,纵坐标亮度L。图4显示颜色视觉感知空间色相位面的相关颜色边界,横坐标饱和度C,纵坐标亮度L,例举h=110°色相位面,其中,蓝点表示设备最大饱和度Cmaxh1,蓝线表示颜色边界CmaxL1,黑圈红点表示可见光颜色最大饱和度当量Cmaxhd,黑虚线表示当量颜色边界CmaxLd,红点表示可见光颜色最大饱和度Cmaxh2,红线表其示意边界。图5显示计算像素颜色视觉感知饱和度扩展算法,图中CL点表示像素颜色坐标,CgL点表示饱和度映射拐点,红线表示颜色归并的亮度序列,其余与图4相同。图6和图7显示经本发明的方法处理前和处理后的图像,彩色图像的右边为原图,左边为FECr算法计算饱和度C扩展后图像。图8-1使用FECr算法计算机程序的典型系统流程。图8-2使用FECr算法IP的电视机典型系统流程。图8-3使用FECr算法ASIC的电视机典型系统流程。图8-4使用FECr算法ASIC的电子设备典型系统流程。
具体实施方式
实施例1实施本发明的彩色数字图像像素颜色视觉感知高保真变换流程。(1)计算设备颜色视觉感知空间色相位面颜色边界数据库。数据库经由本发明的系统中的设备颜色视觉感知空间色相位面颜色边界计算模块运算完成,计算包括:(1-1)将设备颜色空间的红、绿和蓝三原色值变换为CIELAB空间L、C和h值的计算,由设备颜色空间红、绿和蓝三原色值变换为CIELAB空间L、C和h值计算单元执行:具有图像显示功能的电子设备典型为sRGB颜色空间和D65白场,sRGB空间RGB三原色色品查阅:xr,max=0.64 yr,max=0.33,xg,max=0.30 yg,max=0.60,xb,max=0.15 yb,max=0.06D65白场CIEXYZ三刺激值查阅:Xw=0.950456 Yw=1 Zw=1.089058由以上参数计算颜色变换所需3×3矩阵系数:利用设备白场三原色的RGB值和CIEXYZ三刺激值以及正向变换公式:将3×3矩阵系数表示为三原色色品值与亮度值的乘积形式:由以上方程计算得到RGB三原色最大饱和度的亮度值:Yr,max=0.2126 Yg,max=0.7152 Yb,max=0.0722应用以上值计算得到矩阵3×3系数:应用以上矩阵系数计算设备颜色RGB值到CIEXYZ空间X、Y和Z值的变换,再应用D65白场三刺激值计算颜色XYZ值到CIELAB空间L、C和h值变换。典型设备由红、绿和蓝三原色每种8位合成颜色,即23×8共16777216种颜色标量,依次由以上计算完成变换。非标设备计算白场和红、绿和蓝三原色最大饱和度时的CIEXYZ三刺激值:使用标准分光光度仪,按照常规规范测量设备白场三刺激值Xw’、Yw’和Zw’,计算白场归一化系数K1:K1=100/Yw’计算设备白场的CIEXYZ三刺激值:Xw=Xw’×K1,Yw=Yw’×K1,Zw=Zw’×K1使用标准分光光度仪,按照常规规范分别测量设备红、绿和蓝三原色最大饱和度条件下的三刺激值,Xr’、Yr’和Zr’,Xg’、Yg’和Zg’,Xb’、Yb’和Zb’,再分别计算三原色的CIEXYZ三刺激值:Xr,max=Xr’×K1,Yr,max=Yr’×K1,Zr,max=Zr’×K1Xg,max=Xg’×K1,Yg,max=Yg’×K1,Zg,max=Zg’×K1Xb,max=Xb’×K1,Yb,max=Yb’×K1,Zb,max=Zb’×K1用以上计算得到的三原色最大饱和度时CIEXYZ三刺激值,替代以上所述标准方法中的3×3矩阵系数,以计算得到的白场CIEXYZ三刺激值替代以上所述设备标称白场CIEXYZ三刺激值,应用以上所述标准方法,依次将共16777216种颜色的R、G和B数值变换为CIELAB空间L、C和h数值。(1-2)设备颜色视觉感知空间色相位面颜色边界的计算,由设备颜色视觉感知空间色相位面颜色边界提取单元执行。以0-359整数表示基准色相位面,以色相h值四舍五入归并设备颜色进入相应基准色相位面,以0-100整数表示基准亮度序列,以L值四舍五入归并颜色进入相应亮度序列。提取色相位面各亮度序列中最大饱和度值CmaxL1,作为该色相位面的颜色边界计算基础。(1-3)色相位面颜色边界平滑计算,由色相位面颜色边界CmaxL1平滑单元执行:提取色相位面中最大饱和度值Cmaxh1具有的亮度LCmaxh1到最低亮度L=0的亮度序列区间所对应的颜色边界,以标准线性插值算法计算平滑边界,修整原亮度序列的最大饱和度CmaxL1非平滑递减或填补缺失。计算得到的此部分颜色边界CmaxL1连同由亮度LCmaxh1到L=100的亮度序列区间对应的颜色边界CmaxL1,表示该色相位面的最终应用颜色边界。以上算法中所称的平滑,即颜色亮度序列由高到低排列,其饱和度CmaxL1小于以上序列且大于以下所有序列。饱和度小于计算值则用计算值,大于计算值则不变。将以上计算结果存储为数据库。数据按照首序色相位面h次序亮度序列L排序,共36360行。以上步骤(1)计算流程如图2-1所示。(2)计算可见光颜色视觉感知空间色相位面颜色当量边界数据库。可见光颜色视觉感知空间色相位面颜色当量边界数据库经由本发明的系统中的可见光颜色视觉感知空间色相位面颜色最大饱和度计算模块以及可见光颜色视觉感知空间色相位面颜色当量边界计算模块运算完成,计算包括:(2-1)可见光颜色视觉感知空间色相位面颜色最大饱和度计算,(2-1-1)色相位面38°-317°计算,由色相位面38°-317°计算单元执行:以CIE 1931XYZ标准色度观察者光谱三刺激值中波长380nm至780nm间隔5nm的x、y和z数值,以及D65白场CIEXYZ三刺激值,以CIE推荐的方法计算CIELAB空间L、C和h数值,并以h值四舍五入归并色相位面,取用38°到317°色相间隔内色相位面的L和C数值,并线性插值计算其中的空白色相位面的L和C值,以L和C值作为可见光颜色视觉感知空间相应色相位面的最大饱和度Cmaxh2及其亮度LCmach2。(2-1-2)色相位面0°-37°及318°-359°计算,由色相位面0°-37°及318°-359°计算单元执行:应用CIERGB空间RGB三原色色品参数:xr,max=0.735 Yr,max=0.265,xg,max=0.274 Yg,max=0.717,xb,max=0.167 Yb,max=0.009以及D65白场参数,以步骤(1)中相同方法计算得到3×3矩阵系数:Xr,max=0.4108 Yr,max=0.1481 Zr,max=0Xg,max=0.3210 Yg,max=0.8401 Zg,max=0.0105Xb,max=0.2185 Yb,max=0.0118 Zb,max=1.0783以上述矩阵系数以及D65白场CIEXYZ三刺激值,计算CIERGB空间红、绿和蓝三原色合成的全部颜色的L、C和h参数,在归并的色相位面中,选用0°到37°和318°到359°色相位面,并提取其中最大饱和度Cmaxh2及其亮度LCmach2数值。(2-2)可见光颜色视觉感知空间色相位面颜色当量边界计算,由可见光颜色视觉感知空间色相位面颜色当量边界CmaxLd计算模块执行:(2-2-1)可见光颜色视觉感知空间与设备颜色视觉感知空间色相位面最大饱和度比值及优化计算,由可见光颜色视觉感知空间与设备颜色视觉感知空间色相位面最大饱和度比值及优化计算单元执行:选择0°到359°色相位面,分别计算可见光颜色空间Cmaxh2与设备颜色空间Cmaxh1的比例值Bmaxh:Bmaxh=Cmaxh2/Cmaxh1检查发现Bmaxh最大接近5,应用发现设备sRGB颜色空间不宜直接应用比例值Bmaxh扩展颜色饱和度。设置比例系数FX1和当量系数FX2,其中FX1数值为4.5,FX2数值为1.9,计算Bmaxh的规范化当量值Bmaxd:Bmaxh值大于FX1的色相位面的规范化计算:Bmaxd=(Bmaxh-FX1)/(比例区间最大比例值-FX1)*0.1+FX2Bmaxh值小于等于FX1大于(FX1-1)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-1))/(比例区间最大比例值-(FX1-1))*0.05+(FX2-0.05)Bmaxh值小于等于(FX1-1)大于(FX1-1.5)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-1.5))/(比例区间最大比例值-(FX1-1.5))*0.05+(FX2-0.1)Bmaxh值小于等于(FX1-1.5)大于(FX1-2)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-2))/(比例区间最大比例值-(FX1-2))*0.1+(FX2-0.2)Bmaxh值小于等于(FX1-2)大于(FX1-2.5)的色相位面的规范化计算:Bmaxd=(Bmaxh-(FX1-2.5))/(比例区间最大比例值-(FX1-2.5))*0.05+(FX2-0.25)Bmaxh值等于(FX1-2.5)及以下的色相位面的规范化计算:Bmaxd=Bmaxh/比例区间最大比例值*0.05+(FX2-0.3)(2-2-2)可见光颜色视觉感知空间色相位面最大饱和度当量及颜色当量边界计算,由可见光颜色视觉感知空间色相位面最大饱和度当量Cmaxhd及颜色当量边界CmaxLd计算单元执行:色相位面最大饱和度当量Cmaxhd计算:Cmaxhd=Cmaxh1×Bmaxd色相位面颜色当量边界计算:在横坐标为饱和度C和纵坐标为亮度L的笛卡尔坐标平面,以Cmaxh2和LCmaxh2值标点Dmaxh2,在Dmaxh2到L=100点连线上标示Cmaxhd,其纵坐标值四舍五入的亮度序列值记为LCmaxhd,其坐标点记为Dmaxhd。在该坐标平面标示相同色相位面的设备颜色边界,再标示Dmaxhd到L=0点连线,计算其亮度区间中相应亮度序列的最大饱和度值平滑递减的前提下包容设备颜色边界所需的饱和度值CmaxLd,此部分值及Dmaxhd到L=100点连线上饱和度值CmaxLd,构成可见光色相位面颜色的当量边界。以上所称包容设备颜色边界所需的饱和度的算法,以设备颜色边界上拐点亮度序列的最大饱和度值增加2-3%。将以上计算结果存储为数据库,与以上设备颜色数据库格式及排序相同。(2-3)可见光颜色当量空间与设备颜色空间色相位面最大饱和度比例计算:从以上两数据库分别检索色相位面最大饱和度Cmaxh1和Cmaxhd计算二者比例,建立数据库,以色相位面h排序,数据360行。以上步骤(2)计算流程如图2-2所示。(3)完成彩色数字图像的红、绿和蓝三原色值转换为CIELAB空间L、C和h值并归并入相应色相位面及亮度序列,由彩色数字图像像素颜色模式正向转换以及归并色相位面和亮度序列模块执行。计算包括:(3-1)彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算,由彩色数字图像像素颜色RGB值转换为CIELAB空间的L、C和h值的计算单元执行:使用显示图像的设备标称或图像本身嵌入的白场和红、绿和蓝三原色相应参数,应用CIE推荐的标准算法,将图像像素的红、绿和蓝三原色表示的颜色转换为CIEXYZ三刺激值及CIELAB空间L、C和h值,算法程序及相关参数与步骤(1)相同。非标设备上显示图像需测量计算设备白场和红、绿和蓝三原色最大饱和度时的CIEXYZ三刺激值,算法程序及相关参数与步骤(1)相同。(3-2)像素颜色色相位面和亮度序列归并计算,由像素颜色色相位面和亮度序列归并单元执行:将图像颜色空间划分为0-359共360个基准色相位面,以色相h值四舍五入归并进入相应基准色相位面,将色相位面中亮度L范围划分为0-100共101个基准序列,以亮度L值四舍五入归并进入相应亮度序列,使像素颜色参数可用整数色相h,整数亮度L和含有四位小数的饱和度C表示,创建饱和度扩展的计算条件之一。(4)计算像素颜色饱和度扩展,由图像像素颜色饱和度值扩展模块执行。计算包括:(4-1)计算像素颜色饱和度映射拐点CgL,由饱和度映射拐点CgL计算单元执行:CgL=CmaxL1*XS1设置拐点函数XS1为0.85;(4-2)计算像素颜色饱和度扩展比例BIL,由像素颜色饱和度扩展比例BIL计算单元执行:BIL=CmaxLd/CmaxL1调用本发明的系统中的多种饱和度扩展比例调控子模块:(4-2-1)设置饱和度扩展比例调控系数:所述计算包括设置多个饱和度扩展比例调控系数BIKx,数值范围0.00-1,以BILY=BIKx×BIL作为像素实际应用的饱和度扩展比例。典型,BIK1=0.75用于景物为主要内容的图像,BIK2=0.15用于人物为主要内容的图像。(4-2-2)设置指定色相位面区间边界:所述计算包括设置多对指定色相位面区间边界HDx和HGx,数值范围0°-359°。典型,人物图像设置HD1=340°和HG1=100°,色相角h≤HG1或h≥HD1的色相位面颜色应用BILY=BIK2×BIL,其余颜色应用BILY=BIK1×BIL。设置色相区间边界内侧过渡色相间隔数值为10。(4-2-3)设置饱和度比例阈值:所述计算包括设置多个饱和度比例阈值CGx,数值范围0.00-1。典型,人物图像CG1=0.6,对以上指定h≤HG1或h≥HD1色相区间颜色,饱和度比例低于阈值,BILY=BIK2×BIL,饱和度比例高于阈值,BILY=BIK1×BIL。阈值以上一侧设过渡区,设置过渡区范围0.1。(4-3)计算像素颜色饱和度CL扩展,由像素颜色饱和度CL扩展到CLN计算单元执行:CLN=CL*BILY,判断,如果CLN大于CgL须计算映射:CLN=CgL+(CLN-CgL)/(CmaxLd-CgL)*(CmaxL1-CgL)(5)将图像像素颜色L、h、和饱和度CLN数值计算为R、G和B值。调用图像像素颜色模式逆向变换及规范化模块,计算包括:使用CIE推荐的标准方法,以图像像素颜色正向变换得到且保持不变的L、h值以及经计算扩展后得到的CLN值计算为图像的红、绿和蓝三原色值。此算法为以上步骤(3)计算的逆运算,由像素颜色CIELAB空间参数计算CIEXYZ三刺激值所需白场同样为D65,由像素颜色CIEXYZ三刺激值计算RGB值所需3×3矩阵系数由以上步骤(3)所用矩阵3×3系数求逆获得:对计算得到的R、G和B值分别取整,并对大于255的数值规范化为255,小于0的数值规范化为0。以上步骤(3)(4)(5)计算流程如图2-3所示。图像全部像素依次执行上述彩色数字图像的FECr算法流程完成所述计算,图像就完成了视觉感知高保真变换。实施例2使用本发明的FECr算法的典型系统11、以计算机硬盘HD作为提交FECr算法的典型载体,同样功能的载体还包括CD、DVD、U盘等,以及经授权由网络调用FECr算法。FECr算法以程序方式由计算机CPU+GPU调用,在RAM中运行。彩色数字图像存储在计算机硬盘中由FECr算法程序调用,经FECr算法处理后再储存回硬盘中。图像数据可以拷贝在CD、DVD、U盘等载体和另外硬盘中,也可以通过网络传输至指定位置。FECr算法程序可以处理单帧图像和帧序列图像。单帧图像格式可是.tif、.bmp等未压缩格式,也可是.jpg等压缩格式。帧序列图像格式可是通用.MOV、.AVI等,也可使用专用I/O处理相关格式文件。实时观看FECr算法变换图像效果的显示器数量可以按需配置。系统如图8-1所示。1.2、以电视机主芯片作为FECr算法IP的典型应用,IP中gamma校正模块使用的R、G和B各色阶查找表可根据电视机主芯片中特殊gamma设置进行调整。系统如图8-2所示。1.3、以电视机作为FECr算法ASIC的典型应用,设置与电视机匹配的I/O获取视频图像颜色RGB数据。系统如图8-3所示。1.4、应用FECr算法ASIC的设备还包括笔记本电脑、平板电脑、手机、游戏机、LCD显示器、计算机显卡等,系统如图8-4所示。

企业营业执照
专利注册证原件
身份证
个体户营业执照
身份证
专利注册证原件
专利代理委托书
转让申请书
转让协议
手续合格通知书
专利证书
专利利登记簿副本





提交

公众号
全国技术转移公共服务平台